科技日報記者 張夢然
最新一期《自然·通訊》發(fā)表的一篇論文報道了一種柔性薄片機器人,能靈活移動和抓取物體。這一進展有望改進自主系統在探索環(huán)境、觸覺顯示(幫助用戶“感知”虛擬刺激的技術)和智能醫(yī)療等領域的應用。
能夠改變形狀的機器人也能適合更多應用,例如探索環(huán)境、操控物體。傳統方法采用固定鉸鏈結構,限制了結構配置的范圍和適應性,而類似折紙的折疊變形是一種更理想的方法。
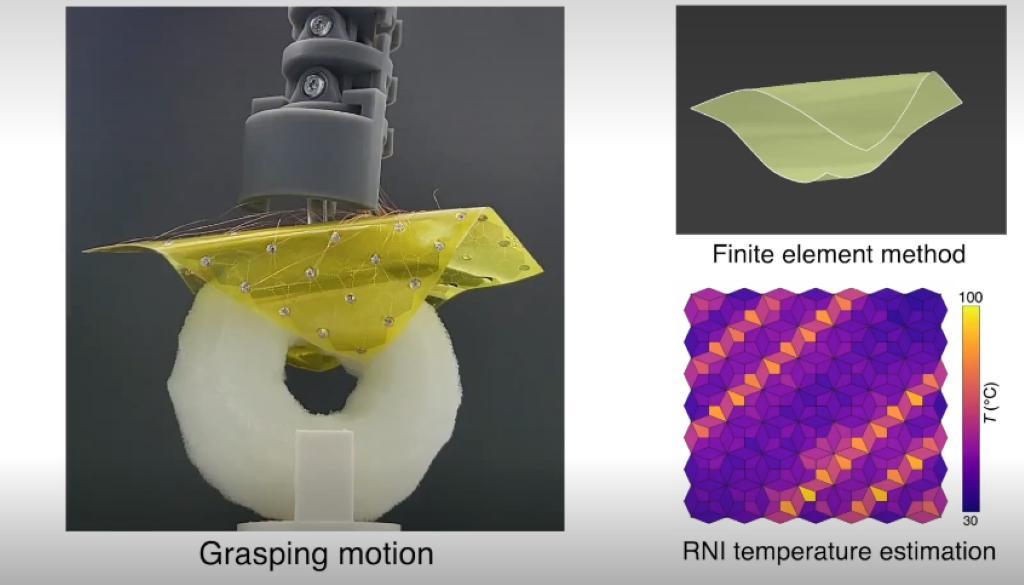
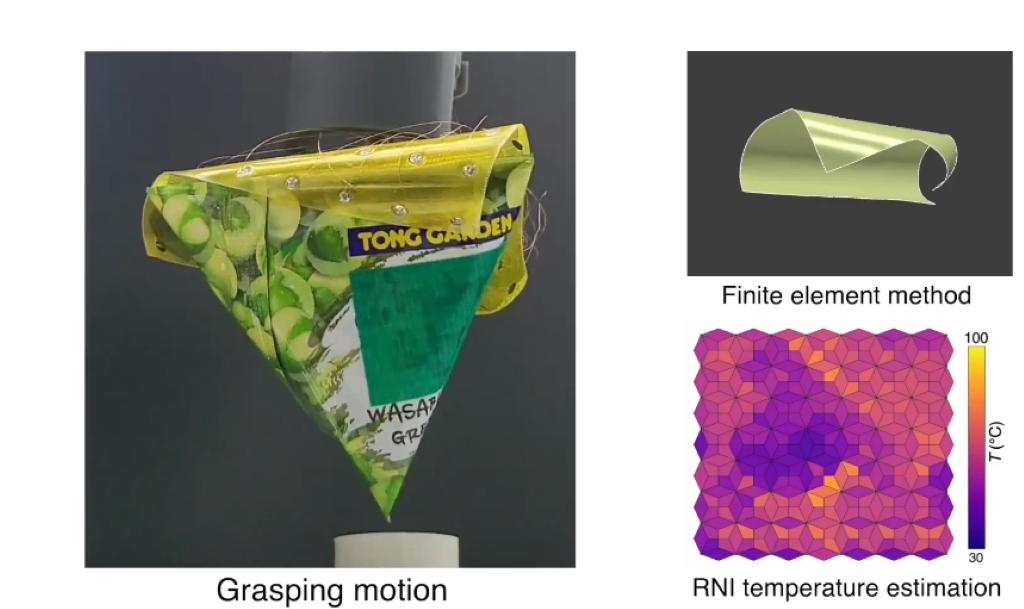
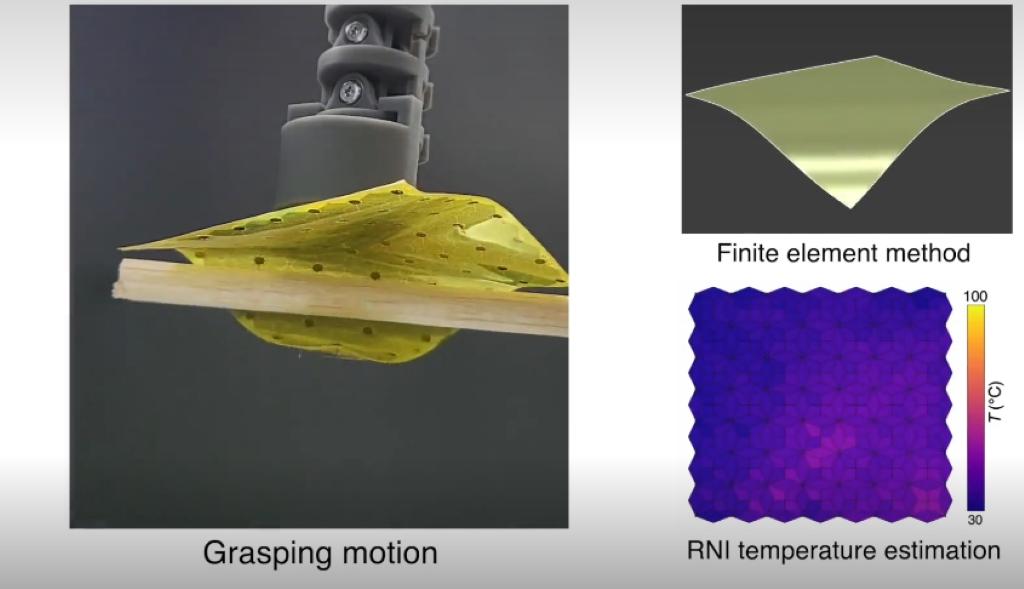
韓國科學技術院團隊此次制作了一種折疊薄片式機器人,使用密集分布的熱敏電元件構成,受熱可改變形狀。研究團隊用一張40平方厘米的薄片展示了這一方法,該薄片由308個兼具加熱器和感受器功能的電阻構成。這種雙功能使之可以實現精確控制移動,系統可根據感受器反饋作出持續(xù)調整。
實驗中,研究團隊讓機器人爬行通過表面,抓取或抬起各種形狀不規(guī)則的物品(如培養(yǎng)皿、立體塑料包裝、木棍、海綿等),展示了這種機器人的靈活性。
實驗表明,它可實現-87°—109°之間的折疊角度,并在一定溫度范圍內(30℃—170℃)保持性能一致。系統還能快速精確響應環(huán)境變化,以保障穩(wěn)定性和效率的提升。
這一可編程折疊薄片能提升自主系統的多功能性和可適應性,使其在不可預測的地形上更有效地發(fā)揮功能。然而,還需要材料技術和結構設計的進步,才能充分挖掘該技術的潛力。